고정 헤더 영역
상세 컨텐츠
본문
728x90
반응형
최근 ROS를 활용할 일이 생겼습니다. 대학원 연구실에서 선후배분들이 로봇으로 실험하는 것을 옆에서만 보다가, 실제로 연구/개발을 실행해본것은 처음입니다. 다른 것을 배울 때와 마찬가지로 인터넷 검색과 유투브 검색을 통해서 기본적인 내용을 우선 확인했습니다. ROS의 경우 인터넷에 많은 자료들이 정리되어있어서, 기존 개발 내용들을 따라가는 것이 많이 어렵지는 않았습니다. 일단 개발 PC에 ROS2 foxy를 설치했습니다. 아래 링크를 따라서 진행하니, 큰 어려움 없이 설치되었습니다. 제가 ROS를 설치하려고 마음을 먹었을 때는, galactic 버전이 아직 나오지않아서 foxy로 설치를 진행했습니다.
* 설치 환경: 우분투 20.04
https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Binary.html
Installing ROS 2 on Ubuntu Linux — ROS 2 Documentation: Foxy documentation
You're reading the documentation for an older, but still supported, version of ROS 2. For information on the latest version, please have a look at Galactic. Installing ROS 2 on Ubuntu Linux This page explains how to install ROS 2 on Ubuntu Linux from a pre
docs.ros.org
이 글에서는 ROS2 foxy를 설치 후, 실행 환경을 마저 세팅하는 부분을 정리하겠습니다.
ROS2 foxy를 설치 후, 새로운 command 창에서 실행할때는 아래 명령어를 먼저 쳐주어야합니다.
$ source /opt/ros/foxy/setup.bash
이렇게 계속 새로운 command 창을 띄울 때마다 입력해주는 것은 번거롭기때문에, 해당 command를 .bashrc 파일에 입력합니다. 아래와 같이 입력하면 .bashrc 파일에 해당 command가 입력됩니다.
$ echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc
위의 command를 실행한 후, 설치한 ROS의 버전을 확인해봅니다. 설치한 ROS 버전확인에는 printenv와 grep명령어가 활용됩니다.
$ printenv | grep -i ROS저의 경우 ROS_VERSION=2, ROS_PYTHON_VERSION=3, ROS_DISTRO=foxy 로 설정된 것을 확인할 수 있었습니다. ROS_DOMAIN_ID도 이미 export를 해놓아서, 해당 내용 역시 출력된 것을 확인할 수 있습니다.
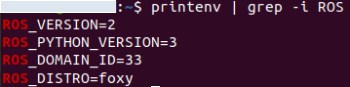
ROS가 구동된 로봇 에이전트에게 unique한 ID를 주기위해, 제 임의로 ROS_DOMAIN_ID는 33으로 설정해서 export했습니다. 해당 command 역시 새로운 command창을 열때마다 입력해주어야 하기 때문에, 작업의 편리를 위해 .bashrc 파일에 입력해두어서 기본적으로 해당 내용이 입력된 상태로 command 창이 열리도록 하겠습니다.
$ echo "export ROS_DOMAIN_ID=33" >> ~/.bashrc이로써 ROS2 foxy 기본 개발 환경을 구성했습니다.
728x90
반응형
'Developer' 카테고리의 다른 글
| Robot 움직이기 - Localization (0) | 2022.03.03 |
|---|---|
| [ROS2 foxy] turtlesim과 rqt (0) | 2022.02.23 |
| Unity ML-Agents 설치 (release 18) 및 에러 대응 (input system, CS0234, active input handling) (0) | 2021.11.24 |
| (원격 연결) Chrome remote desktop (0) | 2021.08.17 |
| (파이썬 패키지) xlrd (0) | 2021.08.16 |





댓글 영역